| Модель самодвижущегося устройства способного двигаться по заданной траектории, обнаруживать и огибать препятствия
Раздел: Исследовательская деятельность // Категория: Примеры ученических исследований |
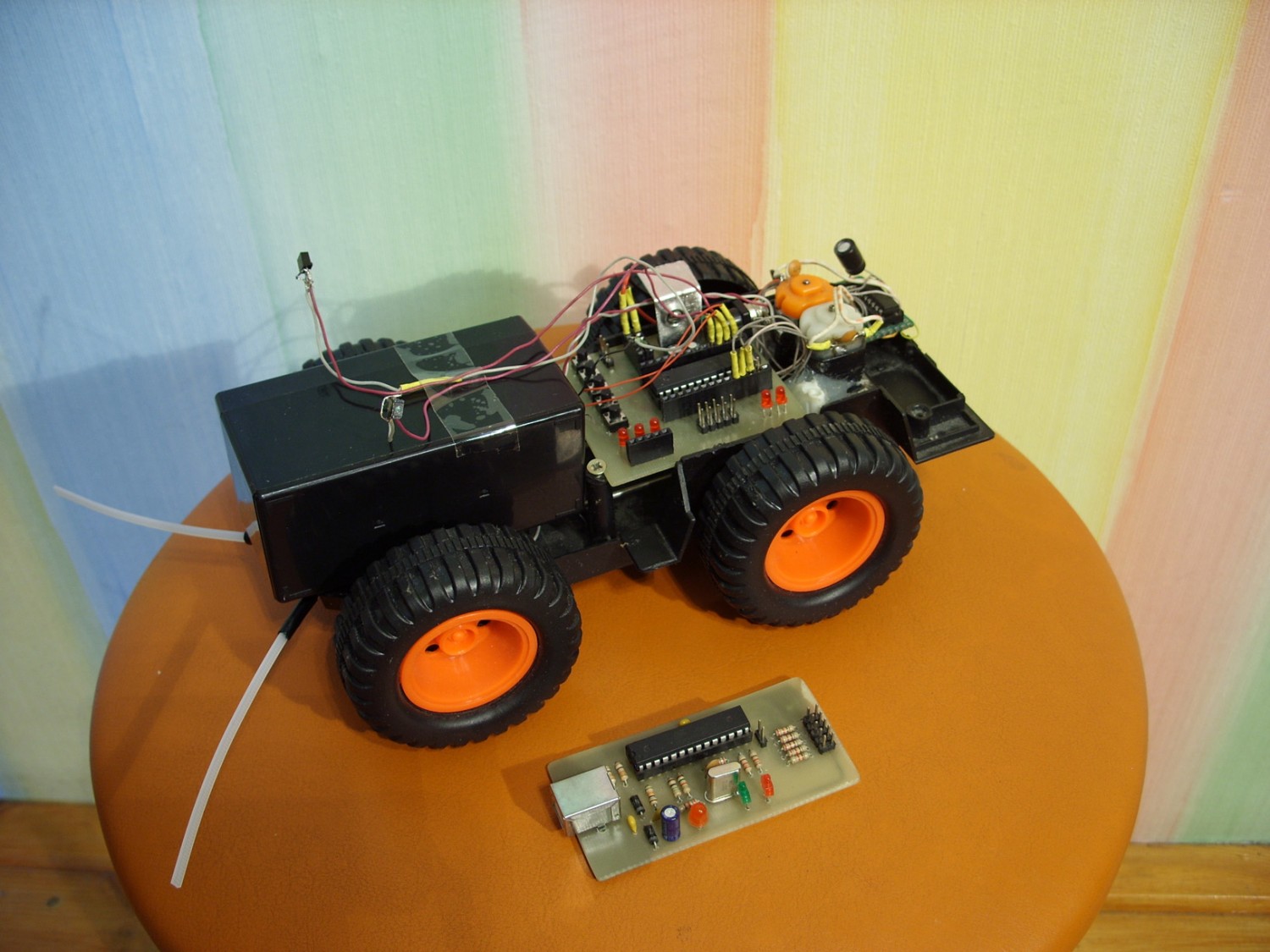 Шекунов Владислав, учащийся X класса Шекунов Владислав, учащийся X класса лицея ГУВПО «Белорусско-Российский университет», г. Могилёв. Диплом III степени областного конкурса (конференции) исследовательских работ учащихся. Цель работы: Спроектировать и изготовить робота, способного обнаруживать и обходить препятствия, реагировать на свет, двигаться по заданной траектории, а так же принимать и обрабатывать команды с пульта дистанционного управления. |
|
| 24.06.2013,
16:54 Рейтинг: 5.0/1
|
| Просмотров: 2665 | Загрузок: 506 | Рейтинг: 5.0/1 | Добавил: AlexGeorg | |
| Всего комментариев: 0 | |